Controlador PID:
Os controladores P, PI, PD, que são variações, e o PID, são controladores que combinam até três respostas (proporcional, integral e derivativa) que atuam sobre o erro presente em um sistema sob controle. O erro do sistema é a diferença entre o valor de referência de controle e sua variável controlada.
O controlador PID é o mais utilizado na indústria e esses estão disponíveis em uma vasta quantidade de produtos comerciais, que vão desde controladores single e mult-loop até Controladores Lógicos Programáveis (CLP / PLC) e Sistemas Digitais de Controle Distribuído (SDCD / DCS).
Esses controladores devem ser aplicados apenas em sistemas lineares ou, quando aplicados em sistemas não lineares, operando em regiões onde as variações ocorram de maneira aproximadamente linear.
Ação de controle:
Como já citado, os controladores PID estão em ampla gama de equipamentos e os parâmetros e formas de implementação matemática variam de fabricante para fabricante, no entanto, o parâmetro que define se a ação de controle é direta ou reversa está sempre disponível.
A ação de controle define como o algoritmo atualiza o seu resultado matemático, como mostrado adiante.
Ação de controle direta:
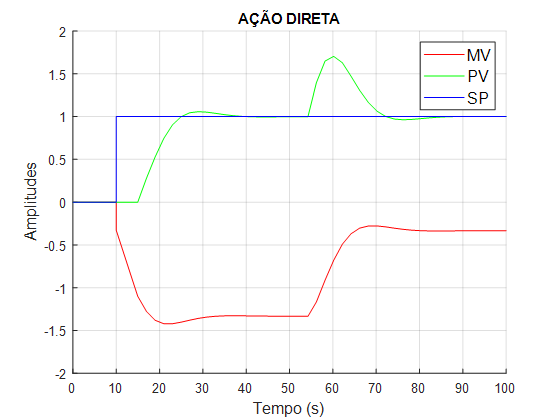
Quando o controlador está configurado para ação de controle direta e considerando a referência (SP) constante, a sua saída (MV) aumenta quando a variável de processo (PV) aumenta. Nesse caso, o erro é calculado (pelo algoritmo de controle) como sendo: ERRO = PV-SP.
A Figura 01 mostra a resposta de um controlador configurado para ação de controle direta; veja a resposta ao distúrbio, a partir do instante t=55s.
Ação de controle reversa:
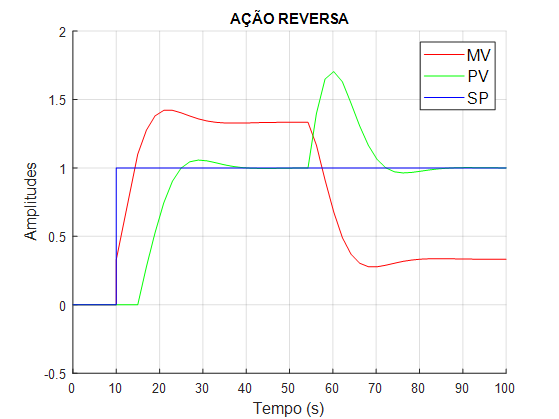
Quando o controlador está configurado para ação de controle reversa e, mais uma vez, considerando a referência (SP) constante, a sua saída (MV) diminui quando a variável de processo (PV) aumenta. Para esse caso, o erro é calculado (pelo algoritmo de controle) como sendo: ERRO = SP-PV.
A Figura 02 mostra a resposta de um controlador configurado para ação de controle reversa; veja a resposta ao distúrbio, a partir do instante t=55s.
Nomenclaturas encontradas:
Como citado anteriormente, os controladores PID são implementados de formas distintas. A seguir são mostrados exemplos de como os parâmetros referentes à ação de controle são apresentados por diferentes fabricantes:
- PAC ControlLogix / PLC CompactLogix (Rockwell):
PID: A ação de controle é definida pelo parâmetro “CA”, sendo que em “0” é reverso e em “1” é direto;
PIDE: A ação de controle é definida pelo parâmetro “ControlAction”, sendo que em “0” é “PV-SP” e em “1” é “SP-PV”; - PLC S7-1500 (Siemens):
A ação de controle é reversa quando o parâmetro “GAIN” é negativo; - DCS I/A Series (Foxboro / Schneider):
Para o bloco PIDFF, o parâmetro é o “rev_dir”, sendo que em “0” a ação reversa é selecionada e em “1”, a ação selecionada é a direta.
Elaborado por: Everton Salomé
Referência LTI: PL05-4010-004
Visite nossa página no Facebook e no Instagram.