Controlador PID:
Os controladores P, PI, PD, que são variações, e o PID, são controladores que combinam até três respostas (proporcional, integral e derivativa) que atuam sobre o erro presente em um sistema sob controle. O erro do sistema é a diferença entre o valor de referência de controle e sua variável controlada.
O controlador PID é o mais utilizado na indústria e esses estão disponíveis em uma vasta quantidade de produtos comerciais, que vão desde controladores single e mult-loop até Controladores Lógicos Programáveis (CLP / PLC) e Sistemas Digitais de Controle Distribuído (SDCD / DCS).
Esses controladores devem ser aplicados apenas em sistemas lineares ou, quando aplicados em sistemas não lineares, operando em regiões onde as variações ocorram de maneira aproximadamente linear.
Variações dos controladores PID:
Os controladores PID, embora operem sob os mesmos conceitos, se apresentam de diversas maneiras.
É importante ressaltar que essas variações determinam que se deve ter cuidado ao migrar um sistema de controle, pois não basta apenas transferir os parâmetros de um controlador para outro; se deve levar em conta o algoritmo de cada um dos sistemas.
Nessa pílula são apresentadas duas variações.
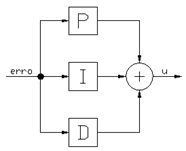
- PID alternativo paralelo:
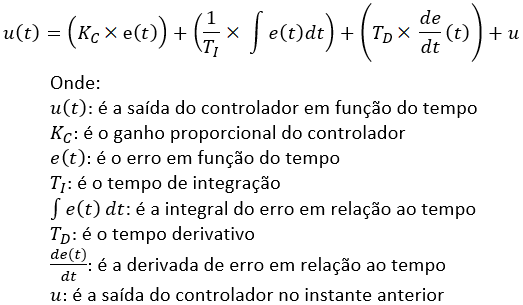
Nessa implementação, mostrada na Figura 01, os ganhos dos controladores são independentes. Sua representação matemática é apresentada na equação mostrada na Figura 02
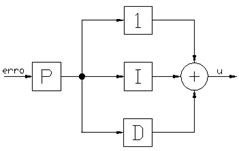
- PID paralelo clássico:
Esse algoritmo, apresentado na Figura 03, é comumente encontrado em sistemas digitais de controle. Nesse algoritmo o ganho proporcional afeta os ganhos integral e derivativo, como pode ser verificado na equação mostrada na Figura 04.

Para acessar essa pílula em nosso perfil do LinkedIn, clique aqui. Para baixar a pílula, em formato .PDF , entre em contato conosco.
Elaborado por: Everton Salomé
Referência LTI: PL05-4010-002
Visite nossa página no Facebook e no Instagram.