Controlador PID:
Os controladores P, PI, PD, que são variações, e o PID, são controladores que combinam até três respostas (proporcional, integral e derivativa) que atuam sobre o erro presente em um sistema sob controle. O erro do sistema é a diferença entre o valor de referência de controle e sua variável controlada.
O controlador PID é o mais utilizado na indústria e esses estão disponíveis em uma vasta quantidade de produtos comerciais, que vão desde controladores single e mult-loop até Controladores Lógicos Programáveis (CLP / PLC) e Sistemas Digitais de Controle Distribuído (SDCD / DCS).
Esses controladores devem ser aplicados apenas em sistemas lineares ou, quando aplicados em sistemas não lineares, operando em regiões onde as variações ocorram de maneira aproximadamente linear.
Ação proporcional:
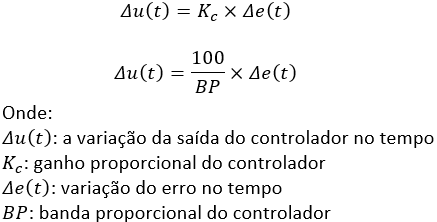
A ação proporcional nada mais é do que uma reação, do controlador, proporcional à magnitude do erro presente. A primeira equação da Figura 01 apresenta como se dá o ganho proporcional de um controlador e a segunda equação o apresenta em função da banda proporcional (BP).
Ação integral:
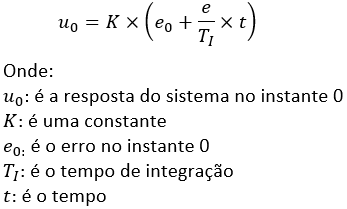
A ação integral é responsável por fazer com que o controlador tenha erro zero em regime permanente. A Figura 02 mostra como se dá essa ação de controle.
Ação derivativa:
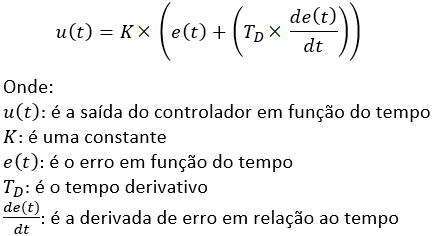
Essa ação é responsável por antecipar a ação de controle em relação ao erro. Essa antecipação se dá através de uma extrapolação linear do valor do erro através do cálculo da reta tangente ao erro dado. A Figura 03 mostra como se dá essa ação de controle.
Proporcional + Integral + Derivativa:
A combinação das três ações é mostrada na Figura 04.

Para acessar essa pílula em nosso perfil do LinkedIn, clique aqui. Para baixar a pílula, em formato .PDF , entre em contato conosco.
Elaborado por: Everton Salomé
Referência LTI: PL05-4010-001
Visite nossa página no Facebook e no Instagram.