Graus de liberdade
Entende-se por graus de liberdade de um controlador, a quantidade de respostas independentes que podem ser ajustadas, ou seja, é a quantidade de funções de transferência em malha fechada que podem ser ajustadas em um mesmo controlador.
Controlador PID com dois graus de liberdade
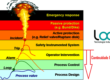
Em um controlador PID com dois graus de liberdade, as respostas às mudanças de referência (setpoint) são desacopladas das respostas aos distúrbios (perturbações). Esse descoplamento permite, por exemplo, que uma malha de controle tenha respostas mais agressivas à rejeição de distúrbios, enquanto apresenta respostas suaves às alterações na referência. Obviamente, o contrário também é possível. Como exemplo de controlador “comercial” com dois graus de liberdade, apresentamos, na Figura 01, o algoritmo de controle, disponível no DCS 800xA da ABB.
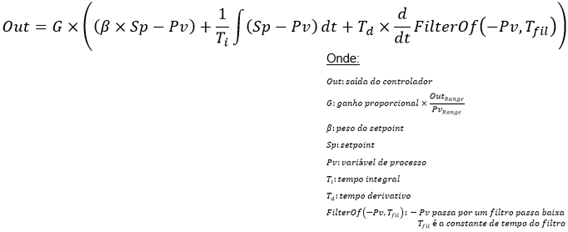
Figura 01
Não faremos análises sobre o algoritmo definido e disponibilizado pela ABB, mas, como pode ser visto na imagem anterior, o parâmetro “beta” é o fator responsável pelo desacoplamento das duas respostas dinâmicas desse algoritmo.
Observe que quanto menor for o “beta”, menor será a parcela proporcional da resposta para as mudanças na referência. Note, ainda, que para as respostas às perturbações, o “beta” não gera influência. Mostramos comparativos entre as respostas na Figura 02, Figura 03 e Figura 04.
Na Figura 02, é apresentado o resultado de uma simulação dinâmica, com o “beta” não influenciando na resposta à mudança de referência, ou seja, nesse caso, não há desacoplamento. Já na Figura 03, é apresentado o resultado de uma simulação dinâmica, com o “beta” atenuando a resposta à alteração na referência.
E, por último, na Figura 04, é apresentado o resultado de uma simulação dinâmica, com o “beta” aumentando a resposta à alteração na referência.
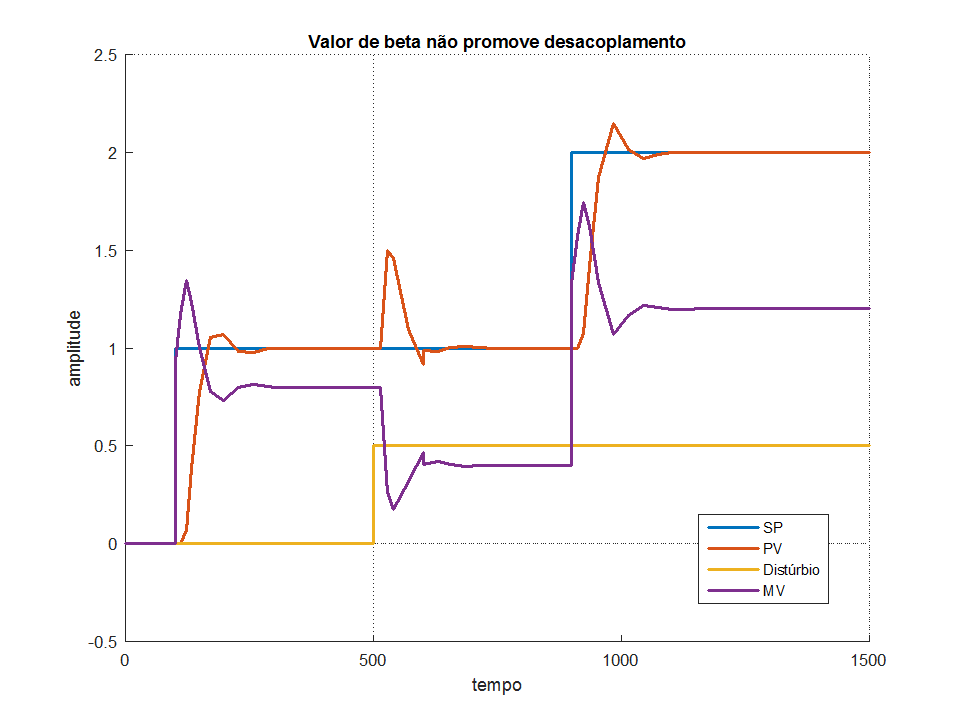
Figura 02
Figura 03
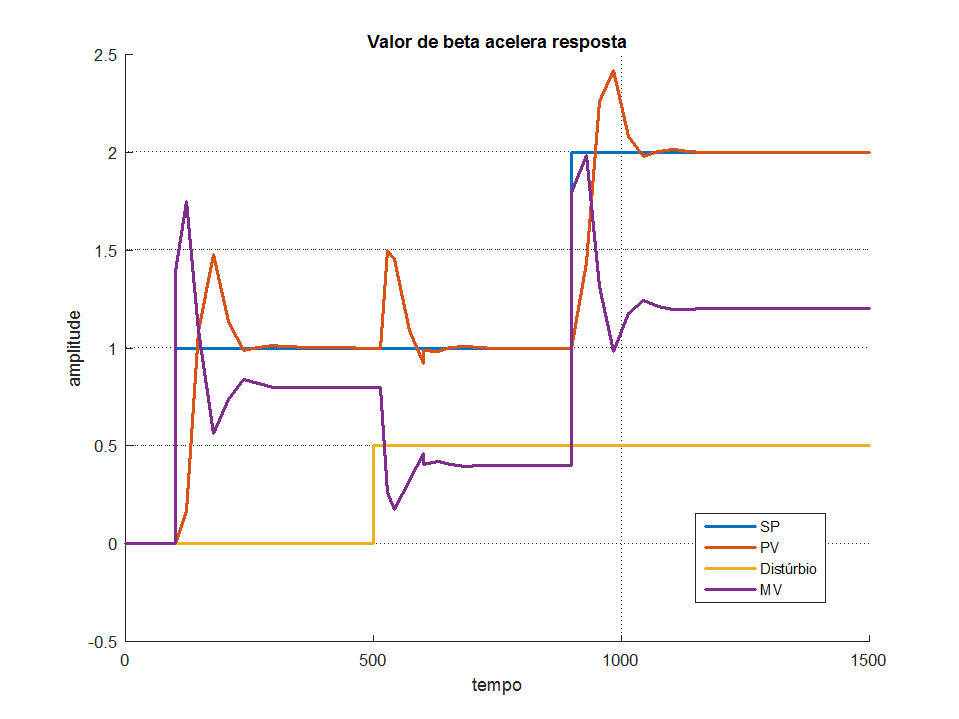
Figura 04